The math behind image transformations
On this page we present some of the math behind image transformations.
It is by no means a complete guide on image processing.
It is just a collection of some aspects that were not obvious to
figure out. For my own reference and
for everyone interested in the topic.
Overview
Very short overview how scaling and rotating images is done:
- Determine the size of the destination image
- Calculate values for each pixel of the destination image:
- Apply coordinate translation, i.e. find out the position
of the destination pixel relative to the source image.
- Calculate the values for the destination pixel, interpolating
from the surrounding source pixels
Top
Rotation: Size of destination image
When rotating an image, the size of the destination image is not given.
There are different approaches to determine that size.
We are going to have a closer look at three of them (those available in imgtools),
but there are yet other approaches not mentioned here.
Top
Keep size
Make the destination image the same size as the original one.
Unless the angle of rotation is a multiple of 180°, there will be empty
areas in the resulting image and, at the same time, not all of the source
image will be visible.
From the mathematical point of view, this is the simplest variant for sure.
There's nothing to calculate!
Top
No clipping
With this approach, we make the destination image large enough to contain
all of the source image. This implies that the blank areas can become a
considerable portion of the image.
This rotation method looks like this:
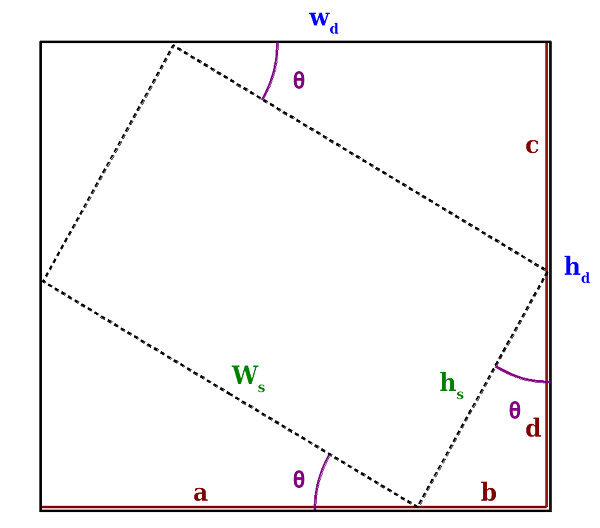
The dashed rectangle represents the rotated source image, the outer one
is our destination image. θ is the angle of rotation,
and
are the width and height of the source image respectively.
and
are the sizes
of the destination image - the sizes we need to calculate.
Let's see how we can calculate them:
There is a problem with the formula above, though: it is valid only
for the interval 0° ≤ θ ≤ 90°. For greather values of θ
we get slightly different formulas (the derivation of these formulae is
left as an excercise for the reader :-)):
The difference between the formulae is only in the negation of
the sin() and cos() values for some cases. Negation occurs exactly in
those intervals where the corresponding function is negative. This means
that we always get positive values for +/-sin(θ) and +/-cos(θ),
which is handy, since negative distances are kinda hard to handle ;-).
It also means that we can derive a one-for-all formula:
Top
No blank areas
Clip away all blank areas: make the the destination image small
enough so there are no blank areas, yet try to make the destination
image as large as possible.
For angles of rotation that are not a multiple of 90°, portions of the source image
will not be visible in the destination image.
This means that we have to inscribe a rectangle into the rotated source,
such that each of its corners touches a side of the source rectangle.
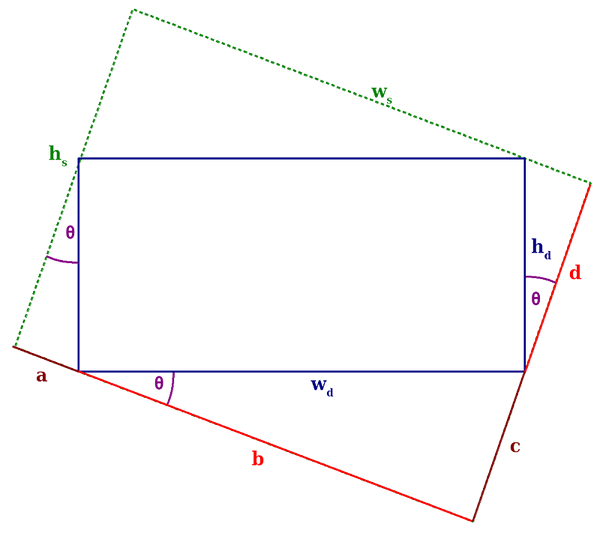
The image above shows the rotated source rectangle (green, dashed lines)
and the destination rectangle we have to calculate (blue lines).
and
are the width and height of the source image,
and
are the dimensions of the destination image. a, b,
c and d
are distances needed in the equations below.
And here's some math!
As for the "no clipping" method, these formulas are valid only in
the interval [0°, 90°]. To find a formula that's valid for all angles,
we can figure out the other three, just as we did above, and then
derive the "grand equation". Long story short, here it is:
They even look similar to the "no clipping" ones, they must be correct,
right?
Uhm, let's try it out. Say we have a source image of size 800x600, and we rotate
it by 10°. We get a destination image of 728x481 (rounded values) - looks good.
Another try: same image, but this time we rotate it by 40°. Ouch! The result is
1308 by -314. A negative height can't be right! And the width is way too
large - not good either. So what's wrong?
We didn't say so, but we assumed that there always is a rectangle that fits
into our rotated source and touches its sides with all four corners.
This assumption, alas, is wrong.
As we can see from the graphic, the destination image gets narrower
with growing angle. At some point, our destination rectangle will be
just a line that goes from one corner of the source to the opposite one.
Past that point, there's no way to draw a rectangle that fits our requirements.
If we keep rotating, at some point we will get a valid result again.
The limits for valid results are the angles formed by the diagonal of
the source rectangle and its sides. For 0° ≤ θ ≤ 90° our formulas
give valid results if:
Obvously, the requirement
that destination touches source with all four corneres does not work
- looks like we need to take another approach. What if only two corners
of the destination image must touch source edges and the other two
must be inside it? With that we face another problem, though: we
won't get a unique result. For any combination of
width, height and angle, there is an infinite number
of rectangles that meet our requirements.
If we add the condition that the area of our destination image
must be maximised, we might get a good result. This requirement
makes perfect sense - after all we want to keep as much as possible
of the original image!
As a first step we need to find a way to express
in terms of
(it could be the other way around as well). We begin with
a graphical representation of the problem:
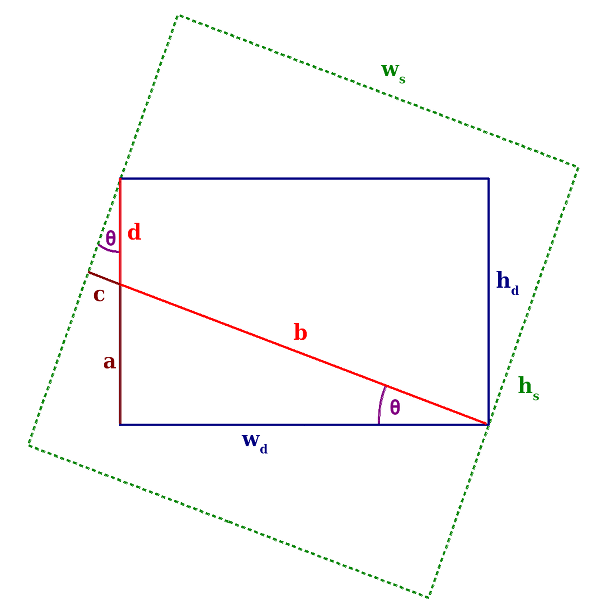
We can see that the destination rectangle must
touch the longer sides of source. If it touches the shorter sides,
it will not be completely inscribed in source. This means that
what we are going to find out next, is valid only if
<
. As usual, for this first step, we
consider the interval 0° ≤ θ ≤ 90° for the angle.
If we repeat this operation for the other three quadrants,
we can determine a formula that's valid for any value of θ:
With that, we can express the area of the destination image
as a function of
.
As it tunrs out, it's a quadratic function with negative a,
which means it has a maximum and we can calculate the value of
and
at this maximum.
As stated before, this formula works only if
<
.
For the case where
>
we get similar formulas:
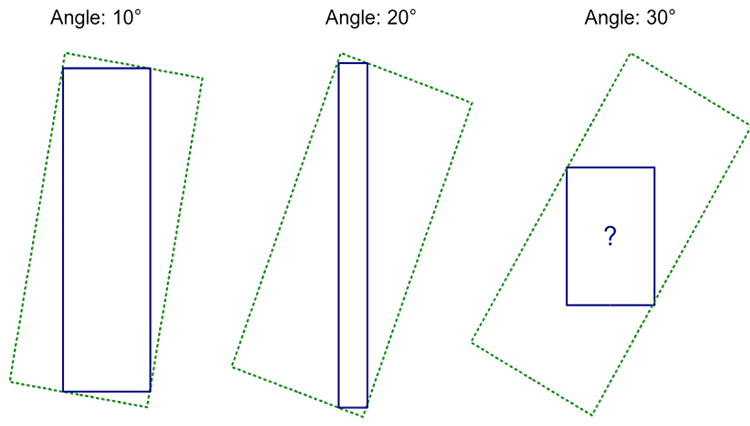
Is that it? Do these formula always give us valid results?
Nope. Consider this:
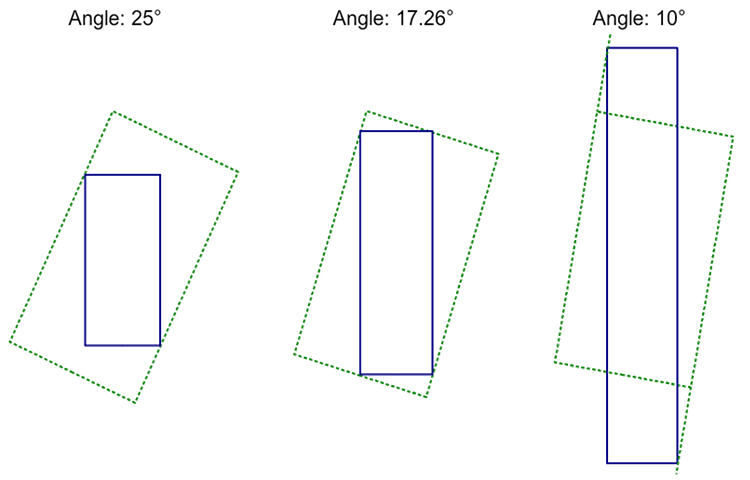
Turns out that the maximise-area approach works well if the
angle is close to 45°. As we go towards 0° or 90°, at some point the
destination rectangle reaches out of source!
Consider the point just before the destination
image with maximised area starts becoming too large. In the
example above, that's at about 17.26°. At this point, destination
touches source with all four corners. Sounds familiar?
Right, we've calculated that already. Looks like that effort
was not vain, after all! Notice that there is another similar "turning
point" somewhere between 45° and 90°, and two more in each of
the other quadrants.
We are getting close to the solution for our problem.
For angles between 0° and the first turning point, we well use
the 4-corners approach we explored before. Between the turning
points, the 2-corners-with-maximised-surface approach will give
us a good result. After that, it's gonna be 4-corners again.
We have to figure out one last thing: where are these turning
points?
Phew, that was some work. But we've got it now!
To sum it up: to find the dimensions for our destination image,
we need first to find out on which side of those turning points we are.
Depending on that, we will use either the 4-corners or the
2-corners variant. Formally, that would be:
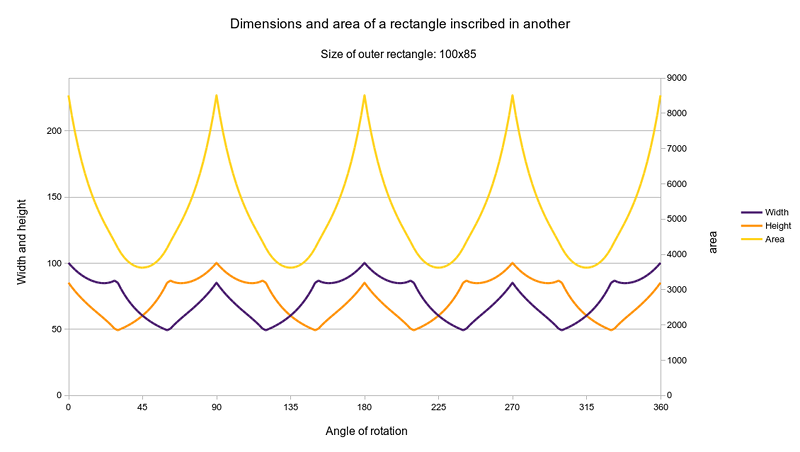
If we plot that, we get a pretty funny curve. Mountains!!
Top
Rotation and coordinate translation
Coordinate translation means to transform the coordinates of a point in
the destination image
to coordinates relative to the source image.
To picture what that means, imagine to rotate the source image
by θ degrees. Then lay the (not rotated) destination
image over that. Now, take a needle and punch it through both
images at the position we need to translate.
Last, remove the needle and destination image and look where
the needle punched the original image. The coordinages of that
point in the source image are our translated coordinates.
And it is from the source values at that
point (and those near it) that we will calculate values for
our destination pixel.
If we want to avoid all that needle punching and let our computer
do the work instead, we need to express that in more algebraic terms. First,
a drawing:
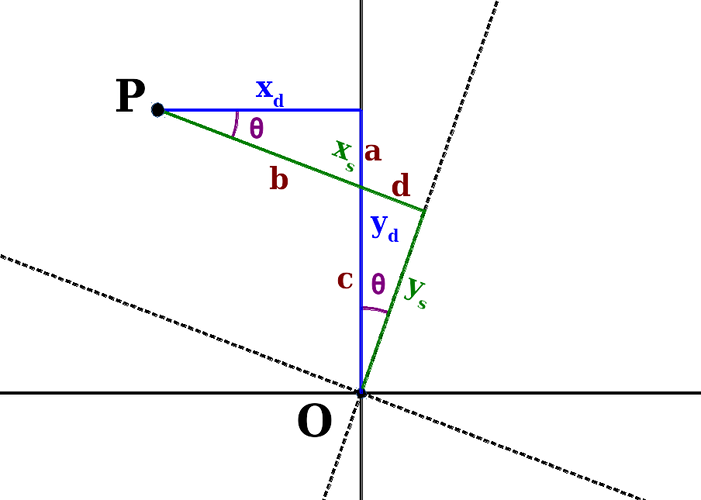
We have two sets of coordinate axes here: the continuos lines
are the axes of the destination image, the dashed lines the ones
of the rotated source image.
P is a point for which we know the coordinates
in destination. Those coordinates are the distances
and
.
We need to find the coordinates in terms of source,
and
. While the origin for both
coordinate systems is the same, the axes are rotated by
θ degrees. That's why the source coordinates are going
to be different.
These equations are not quite what we want yet. You might have noticed that with
those calculations our image will be rotated around the origin of the coordinate
system. This means that we would rotate our image around the
upper left corner, since in digital images the coordinate (0,0) refers to that
corner.
But... We want to rotate our image around the center!
In order to achieve this, we transform the destination coordinates to
make them relative to the center of the image, apply the formula we just found
and transform the result back to coordinates relative to the upper left corner.
In order to transform coordinages so they are relative to the center we must
substract the distance from the pixel at (0,0) to the center of the image.
Similarly, to transform back to a system relative to the top leftmost pixel,
we add that distance.
At first thought, you'd probably say that this distance is
half of width and height. Close, but wrong.
The center of an image is at the point that's exactly in the middle of
the top leftmost and the bottom rightmost pixels.
Top
Interpolation
Now we know how to translate the coordinates of a destination pixel, i.e. we know
its position in the source image. Most likely that position is not going to be
an integer value, which means that it is somewhere in between known data points in
the source image. To get a realistic value for our destination pixel, we must
interpolate from the surrounding source pixels.
There are different flavours of interpolation, with different caracteristics
in quality and computing time.
The most common interpolation methods in image processing are:
- (Bi-)Cubic spline interpolation (there are different sub-types, the most
common is the Catmull-Rom spline)
- Lanczos interpolation
- Linear interpolation
- Nearest neighbour
There are lots of documents about this topic on the net, so we won't go in
more detail here. Here are a few pointers you might find useful or interesting:
Top
|
 Imgtools - manipulate Tk photo images
Imgtools - manipulate Tk photo images